
Video
Kaksoiskaarevan verkon mallintamiseen löytyy vinkkivideo Vertex Systems Oy:n Youtube-kanavalta. Klikkaa alla olevaa linkkiä.
Periaate
Tämä on tekoälyn generoimaa tekstiä videon ääniraidan perusteella
Tämä aineisto opastaa kaksoiskaarevan verkkomallin luomiseen 3D-suunnitteluohjelmistolla käyttäen useita eri tekniikoita. Videotranskriptiossa esitellään, kuinka pallopintaa voidaan hyödyntää pohjana, johon projisoidaan ohjausviivoja tai josta erotetaan osia jakoviivatoiminnon avulla. Puhuja kokeilee erilaisia lähestymistapoja, kuten pintamallinnusta, profiilien neulomista ja apugeometrian käyttöä tavoitteenaan monimutkainen rautalankamalli. Keskeisenä teemana on parametrisuus, sillä mallin kokoa ja kaarevuutta säädetään mittataulukon muuttujilla joustavan muokattavuuden varmistamiseksi. Lopuksi tarkastellaan vaihtoehtoista tapaa rakentaa verkko kaarien ja aputasojen avulla, mikä tarjoaa hallitumman mutta työläämmän lopputuloksen. Ohjeistus korostaa käytännön kokeilun merkitystä parhaan mallinnustavan löytämisessä visuaalisesti haastaville rakenteille.
Mitä eri tapoja lähteiden mukaan on mallintaa kaksoiskaareva verkko?
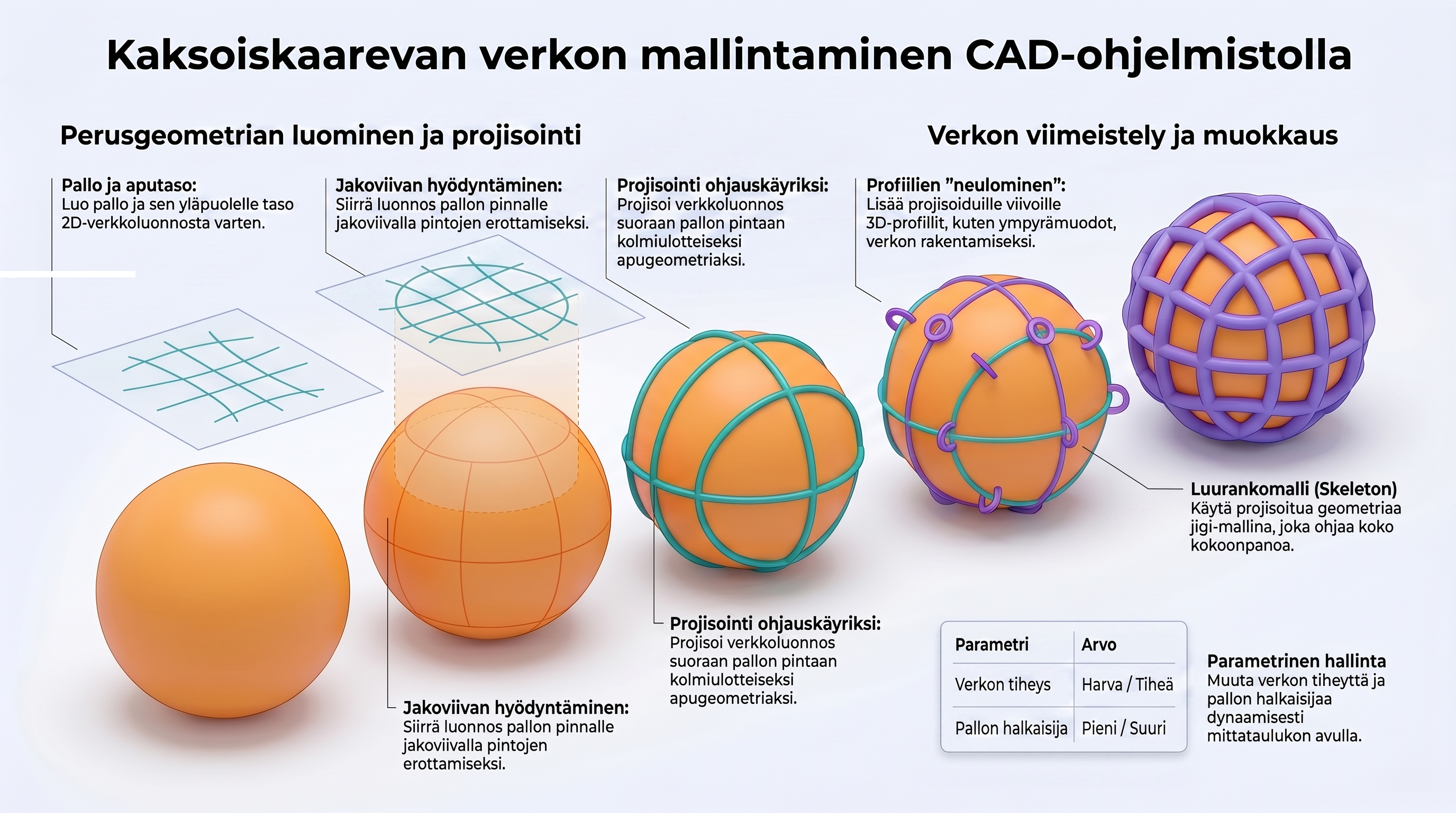
Kaksoiskaarevan verkon mallintamiseen on useita eri lähestymistapoja:
-
Viivojen projisointi pallon pintaan: Ensimmäisessä tavassa pallon päälle luodaan taso, johon luonnostellaan ohjausviivoja esimerkiksi kymmenen asteen välein. Nämä ohjausviivat sekä leveyspiirejä kuvaavat viivat sidotaan reunoihin ja projisoidaan kiinni pallon pintaan. Tämä tapa ei kuitenkaan aina osoittaudu kovin hyödylliseksi tai tarkaksi verkon luomisessa.
-
Jakoviivojen käyttö: Toisessa menetelmässä pallon yläpuolelle luodaan taso, johon piirretään esimerkiksi suorakulmio. Tämän jälkeen jakoviiva-toiminnolla (split line) heijastetaan kuvio pallon pintaan. Jakoviivasta voidaan sen jälkeen muodostaa erillisiä pintoja tekemällä niihin offsetteja (esimerkiksi millimetrin paksuisia pintalappuja).
-
Kokoonpano ja profiilien neulominen (Jigi skeleton): Kehittyneemmässä tavassa pallon päälle tehty luonnos ja väliviivat projisoidaan mallin molemmille puolille. Tämän avulla luodaan kokoonpano ja niin sanottu "jigi skeleton", johon lisätään esimerkiksi ympyrän kaltaisia alkeismuotoprofiileja. Nämä profiilit "neulotaan" pallon pintaan, ja lopputuloksena on joka suuntaan kaareva verkko. Tämän mallin muotoja ja kokoa on mahdollista hallita jälkikäteen mittataulukolla sekä ohjauskäyrää muokkaamalla.
-
Ohjauskäyristä rakennettu rautalankamalli: Neljäs, selvästi työläämpi tapa, on rakentaa erillinen ohjauskäyrähäkkyrä. Tässä menetelmässä luodaan aputasoja, joille piirretään ohjausviivoja ja esimerkiksi kolmen pisteen kaaria peilauksia hyödyntäen. Näistä kaarista ja ohjausviivoista muodostuu rautalankamalli, jonka pohjalta voidaan myöhemmin rakentaa varsinainen verkko tai pintamalli.
Mitä tarkoitetaan jigi skeleton -mallinnuksella tässä yhteydessä?
Tässä yhteydessä "jigi skeleton" -mallinnuksella tarkoitetaan kokoonpanossa hyödynnettävää apurunkoa eli tukirakennetta (luurankoa), jonka varaan varsinainen kolmiulotteinen verkko rakennetaan.
Menetelmä etenee lähteiden perusteella seuraavissa vaiheissa:
-
Apurungon luominen: Geometrian (kuten pallon) pinnalle projisoidaan ohjaavia viivoja, esimerkiksi tason päälle piirretty suorakulmio ja sen väliviivat. Tämä molemmille puolille projisoitu viivasto toimii mallin "jigi skeletonina" eli ohjaavana perusrankana.
-
Profiilien lisääminen ja neulominen: Tämän apurungon mukaisesti malliin lisätään profiileja, kuten ympyrän kaltaisia alkeismuotoja. Nämä profiilit ikään kuin "neulotaan" pallon pintaan skeletonin reittejä pitkin.
-
Viimeistely (trimmaus): Kun geometria on luotu apurungon ympärille, mallin osia ja pintoja voidaan trimmata eli siistiä ja leikata haluttuun muotoon.
Lopputuloksena saadaan joka suuntaan kaareutuva verkko. Tämän "jigi skeleton" -työtavan suurin etu on mallin joustava hallittavuus: koska verkko pohjautuu erilliseen ohjaavaan rankaan, sen kokoa ja kaarevuutta on helppo muuttaa jälkikäteen joko muokkaamalla suoraan ohjauskäyrän projisointia tai syöttämällä uusia arvoja mittataulukkoon.
Mitä etuja mittataulukon käytöllä on tässä mallinnuksessa?
Mittataulukon käytön suurin etu tässä mallinnuksessa on se, että sen avulla voidaan helposti muuttaa ja hallita mallin kokoa, muotoja ja kaarevuutta jälkikäteen.
Kun verkko (esimerkiksi aiemmin mainitulla "jigi skeleton" -menetelmällä) on kertaalleen luotu, mittataulukko mahdollistaa joustavan kokeilun ja mittojen muokkaamisen ilman, että koko geometriaa tarvitsee rakentaa alusta. Lähteessä esitetään tästä käytännön esimerkki, jossa pallon peruskokoa ohjaavaa muuttujaa ("Pallo D") muutetaan lennosta arvoihin 500 ja 600. Malli skaalautuu ja päivittää muotonsa onnistuneesti näiden uusien arvojen mukaisesti.
Vaikka mittataulukko tuo mallintamiseen huomattavaa nopeutta ja joustavuutta, lähde huomauttaa myös mahdollisesta riskistä: arvoja muutettaessa kannattaa olla varovainen, sillä jossain vaiheessa liian suuret tai radikaalit muutokset voivat "rikkoa" mallin rakenteen. Yhdistettynä ohjauskäyrien projisoinnin muokkaamiseen mittataulukko tarjoaa kuitenkin erittäin tehokkaan tavan hienosäätää ja kikkailla valmiin verkon muodoilla.
Mitä riskejä liittyy mallin rikkoutumiseen arvoja muuttaessa?
Arvoja, kuten pallon perusmittaa ("Pallo D"), muutettaessa riskinä on se, että malli saattaa jossain vaiheessa "mennä rikki".
Vaikka mittataulukon avulla onkin kätevää muokata eli kikkailla mallin muotoja, kaarevuutta ja kokoa jälkikäteen, liian suuret muutokset voivat johtaa siihen, ettei geometria enää päivity ehjänä. Lähteessä mallintaja testaa tätä syöttämällä "Pallo D" -muuttujalle arvon 600 ja varoittaa samalla: "Varovasti, näin voi nyt käydä huonosti". Vaikka kyseisessä kokeilussa malli ei vielä rikkoutunutkaan, mallintaja painottaa, että jatkuvasti mittoja muutettaessa tulee lopulta vastaan piste, jossa mallin rakenne pettää.
Tämä riski liittyy suoraan aiemmin käsiteltyyn mallinnustapaan. Koska malli rakentuu "jigi skeletonin", aputasojen, projisointien ja pallon pintaan neulottujen profiilien varaan, liian radikaali muutos perusmitoissa voi aiheuttaa sen, etteivät nämä toisiinsa sidotut geometriat ja ohjauskäyrät pysty enää seuraamaan toisiaan oikein. Siksi mittamuutoksia kannattaa tehdä varovasti ja kokeillen, jotta ohjelmisto pystyy laskemaan ja säilyttämään verkon rakenteen ehjänä myös uusilla arvoilla.
Miten rautalankamalli rakennetaan kolmen pisteen kaaria hyödyntäen?
Lähteiden mukaan ohjauskäyristä rakennettavan rautalankamallin (eli eräänlaisen "ohjauskäyrähäkkyrän") tekeminen on selvästi työläämpi tapa lähestyä kaksoiskaarevan verkon mallintamista verrattuna esimerkiksi aiemmin käsiteltyyn jigi skeleton -menetelmään.
Kolmen pisteen kaaria hyödyntävä rautalankamalli rakennetaan seuraavien vaiheiden avulla:
-
Aputasojen ja ohjausviivojen luominen: Ensin malliin luodaan aputasoja, joille piirretään ensimmäiset ohjausviivat tukirakennetta varten.
-
Kaarien piirtäminen kolmella pisteellä: Luotujen tasojen ja pisteiden avulla malliin piirretään varsinaiset kaaret. Tämä tehdään osoittamalla kaarelle kolme pistettä (esimerkiksi päätepisteet ja yksi keskipiste). Näiden kaarien väliin lisätään edelleen uusia ohjausviivoja.
-
Peilaus (Mirroring): Rakennetta laajennetaan hyödyntämällä peilaustoimintoja, jolloin tehtyjä käyriä ja muotoja saadaan kopioitua mallin toiselle puolelle.
Näitä työvaiheita toistamalla muodostuu pelkistä ohjauskäyristä ja kaarista koostuva rautalanka- tai apumalli. Kun tämä viivoista ja kaarista koostuva perusrakenne on valmis, sitä voidaan myöhemmässä vaiheessa käyttää varsinaisen verkon tai kolmiulotteisen pintamallin pohjana. Lähdemateriaalin puhuja kuitenkin huomauttaa tämän tavan vaativan niin paljon työtä, ettei hän kokeilussaan vienyt mallia aivan loppuun saakka ajan puutteen vuoksi.