
Video
Peräkärryn suunnitteluautomaattista löytyy vinkkivideo Vertex Systems Oy:n Youtube-kanavalta. Klikkaa alla olevaa linkkiä.
Suunnitteluautomaatti: auton peräkärryn konfigurointi Vertex G4:ssä
Yhteenveto
Tämä teksti on generoitu videon litteroinnin perusteella
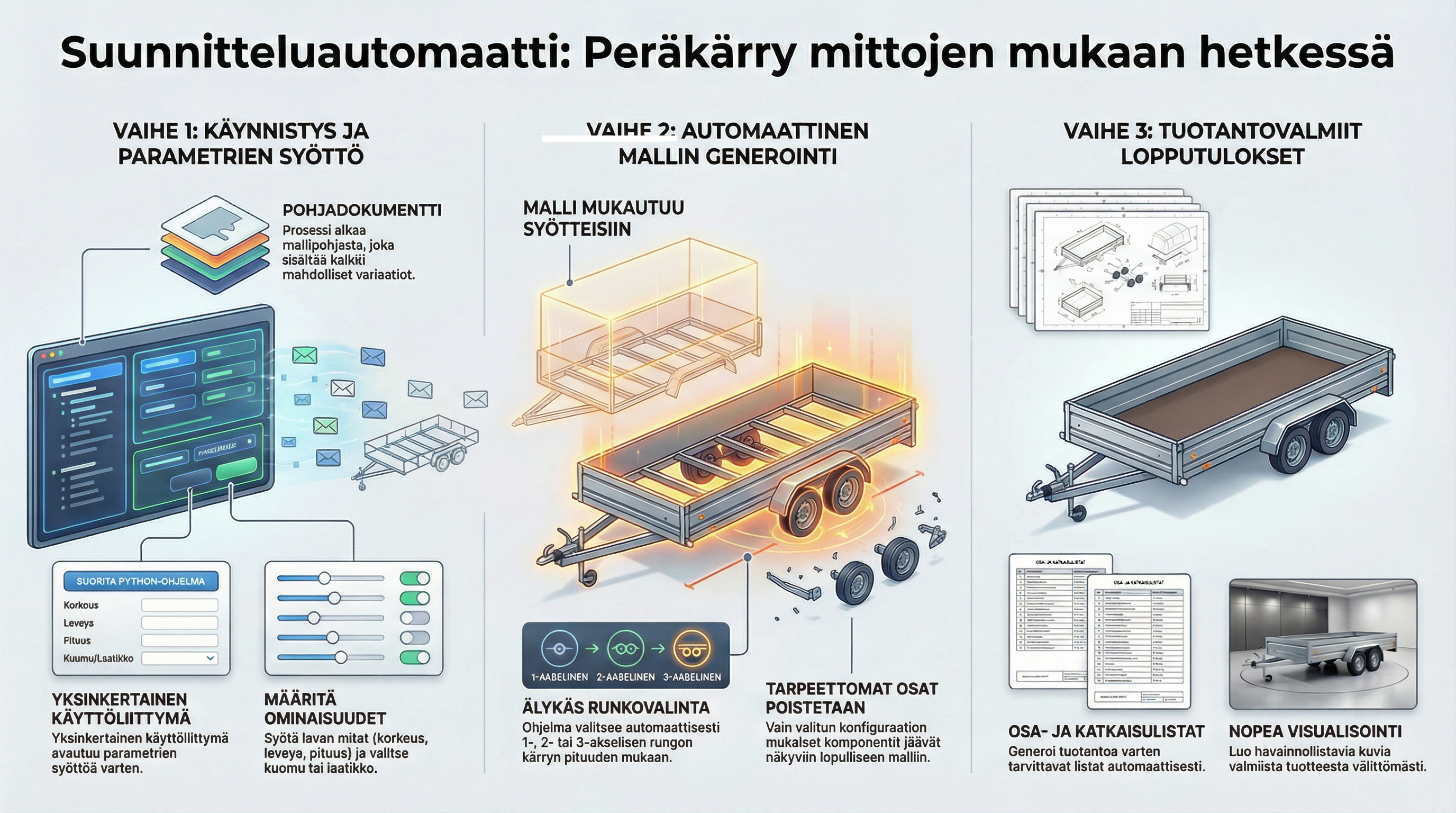
Tällä ohjeella opit, miten Vertex G4:ään rakennetaan suunnitteluautomaatti, joka konfiguroi auton peräkärryn (1–3 akselia) käyttäjän antamien mittojen ja varustevalintojen perusteella. Automaatti ohjaa 3D-mallia, päivittää rungon vaihtoehdot, kuomun/laatikon näkyvyydet, tuottaa nopeasti visualisointeja ja päivittää piirustukset sekä katkaisulistat.
Kokonaisarkkitehtuuri lyhyesti
-
Apugeometria (skeleton/jig) – paikallinen ohjausosa, johon päämitat ja mittamuuttujat määritellään (lavan sisäleveys, sisäpituus, laidan korkeus). Tämä apuosa ohjaa lavan geometriaa ja toimii perustana muille osille.
-
Paikalliset osat ja rungot – kylkilevyt, etu-/perälaidan ratkaisut sekä rungon 1–3 akseliset versiot mallinnetaan apugeometrian päälle. Piirustukset voidaan liittää myös paikallisiin kokoonpanoihin, jolloin ne päivittyvät automaattisesti.
-
Suunnitteluautomaatti Pythonilla – malliin liitetty Python-skripti (yksinkertainen Tkinter-käyttöliittymä) kyselee mitat ja valinnat, asettaa rajat ja päättää näkyvistä vaihtoehdoista (esim. akselimäärä pituuden mukaan; kuomu vs. laatikko). Komennot välitetään Vertexin komentolistaan (visible/remove) mallin indeksien perusteella. Komennot ovat Vertex suunnitteluautomaattikomentoja.
-
Pohjadokumentti & mittataulukko – malli luodaan pohjadokumenttitoiminnolla, ja Python-ohjelma liitetään malliin mittataulukon kautta (luo/muokkaa, suorita automaattisesti).
-
Visualisointi ja piirustukset – yhdellä komennolla syntyy suuntaa-antavat renderit; pää- ja räjäytyskuvat sekä rungon piirustukset ja katkaisulistat voidaan päivittää mallin muutosten jälkeen. (Katkaisulistan automatiikka on mainittu G4:n 2024-version uutena ominaisuutena.)
Vaihe 1: Apugeometrian (skeleton/jig) rakentaminen
-
Luo paikallinen apugeometriaosa, johon määrittelet päämitat muuttujina: sisäleveys, sisäpituus, laidan korkeus. Tarvittaessa pursota apugeometria (esim. lavan korkeuden määrittely samalla).
-
Apugeometrian käyrät ja pinnat toimivat viitteinä kylkilevyjen ja rungon profiilien mallinnukseen.
Vinkki: Nimeä skeleton mielekkäästi – nimi ei ole toiminnan kannalta kriittinen, kunhan se on selkeä (esim. “skeleton”, “jigi”).
Vaihe 2: Paikalliset osat lavalle ja laidoille
-
Mallinna kylkilevyt apugeometrian viivoja hyödyntäen; voit tehdä molemmat puolet erillisinä paikallisina osina.
-
Määrittele etu-/perälaidan ratkaisu (kiinteä/irrotettava, lukot ja saranat). Tietyt “aina päällä” -osat (esim. takavalot, rekisterikilpi, lukot) pidetään näkyvissä riippumatta mitoituksesta.
Vaihe 3: Runkovaihtoehdot (1–3 akselia)
-
Rungolle tehdään oma alikokoonpano apugeometrian alle.
-
Mallinna 1-, 2- ja 3-akseliset rungot apugeometriaan sidottuina, jotta rungon mitat skaalautuvat, kun lavan pituutta muutetaan.
-
Akselimäärä ohjataan myöhemmin Python-koodissa pituusrajojen perusteella (esimerkissämme 1-akseli lyhyille, 2-akseli keskimittoihin ja 3-akseli vasta pitkille pituuksille).
Vaihe 4: Suunnitteluautomaatti Pythonilla (Tkinter-UI)
Automaatti on malliin liitetty Python-skripti, joka:
-
avaa pienen kelluvan kyselyikkunan (Tkinter), jossa käyttäjä syöttää korkeuden, leveyden, pituuden sekä valinnat kuomu/laatikko;
-
asettaa raja-arvot (esim. leveys ≤ 2300 mm, pituus ≤ 8000 mm) ja korjaa ylitykset automaattisesti;
-
päättää runkomallin pituuden perusteella (if-ehdot):
-
alle ~3500 mm → 1 akseli
-
3500–5500 mm → 2 akselia
-
~5500 mm → 3 akselia
-
-
varmistaa kuomu ja laatikko -valintojen keskinäisen poissulkevuuden (vain toinen kerrallaan).
Tekninen ohjaus malliin:
Komennot kootaan commandlist-rakenteeseen, jossa käytetään Vertexin suunnitteluautomaattien mallikomentoja (näkyvissä/poista). Kohdistus tehdään mallin indeksillä (näkyy puutiedoissa); myös nimen käyttö on mahdollista, mutta indeksin käyttö on nopeampaa. Esim. poistetaan 2- ja 3-akseliset rungot, kun pituus on lyhyt; näytetään 1-akselinen.
Vaihe 5: Pohjadokumentti ja mittataulukko
-
Luo uusi malli pohjadokumenttitoiminnolla (toiminto on ollut käytettävissä vähintään versiosta 23 lähtien). Anna nimikkeelle numero ja arkistotiedot.
-
Avaa mittataulukko ja luo Python-ohjelma malliin (tai muokkaa, jos koodi on jo liitetty). Valitse “Suorita automaattisesti”, jos haluat, että UI käynnistyy aina mallia avattaessa.
-
Koodipohjassa on merkitty alue “your code starts here … your code ends here”. Lisää varsinainen ohjauslogiikka tälle välille; Tkinter-importit lisätään alkuun.
Vaihe 6: Visualisointi ja piirustukset
-
Visualisointi: kun malli on koottu, saat nopeasti suuntaa-antavat renderöinnit (esim. sivu-/perspektiivikuvat) esittelyn tai myynnin tueksi.
-
Piirustusten päivitys: päivitä pääkokoonpanon piirustukset ja räjäytyskuvat. Tarvittaessa skaalaa lomakkeet sopimaan uusiin mittoihin.
-
Rungon katkaisulistat: rungon piirustuksen päivityksen yhteydessä katkaisulista päivittyy automaattisesti (mainittu uutena G4 2024 -toiminnallisuutena).
Parhaat käytännöt
-
Paikalliset osat ensin, numerointi vasta valmiille mallille. Tämä helpottaa iterointia; Flow-ympäristössä nimikkeet/numerointi voidaan tehdä myöhemmin
-
Sääntömatriisi valinnoille. Tee Exceliin (tai generoida esim. ChatGPT:llä) matriisi, joka listaa kaikki muuttujat ja sallitut yhdistelmät – tämä selkeyttää ehtolauseiden toteutusta.
-
Indeksit puutiedoista. Käytä komentolistassa mallin indeksejä (puutietonäkymä) kohdistuksen varmistamiseksi.
-
Rajat ja suositusmitat UI:hin. Näytä käyttäjälle suositusarvot; rajoita ääripäitä (esim. max leveys/pituus), jotta mallit pysyvät valmistuskelpoisina.
Tyypillinen työnkulku (askel askeleelta)
-
Luo pohjamalli ja lisää skeleton/apugeometria päämittoineen.
-
Mallinna lavan osat (kylkilevyt, laidan ratkaisut) apugeometrian viitteillä.
-
Mallinna rungon 1–3 akseliset vaihtoehdot apugeometrian alle omaksi alikokoonpanokseen.
-
Luo mittataulukossa Python-ohjelma, lisää Tkinter-UI ja ehtologiikka (rajat, akselisäännöt, kuomu/laatikko).
-
Aja automaatti → malli rakentuu → tee visualisoinnit ja päivitä piirustukset + katkaisulista.
-
Kun malli on valmis, hoida numerointi/Flow-nimikkeet ja viimeistele dokumentaatio.
Vianetsintä
-
Osa ei vaihdu näkyviin/pois: tarkista, että komentolistassa käytetty indeksi vastaa puutiedoissa näkyvää indeksiä. Varmista myös, ettei ristiriitainen ehto aseta samaa osaa sekä visible että remove.
-
Akselimäärä “väärä”: tarkista pituusrajat Python-koodissa (if-ehdot) ja UI:ssa syötetyt arvot.
-
Kuomu & laatikko samaan aikaan: varmista, että valinnat ovat aidosti poissulkevia (esim. “jos kuomu==2 → remove laatikko” ja päinvastoin).
-
Piirustusten lomake ei mahdu: skaalaa lomakkeet ja näkymät vastaamaan uusia mittoja, sitten päivitä piirustukset uudelleen.
Usein kysyttyä
Voinko käyttää linkkiosia paikallisten sijaan?
Voi, mutta iteroinnin ja nopean pohjatyön kannalta paikalliset osat ovat usein sujuvampia. Numerointi kannattaa antaa vasta valmiille kokoonpanolle.
Voiko mittoja rajoittaa UI:ssa?
Kyllä. Rajat (esim. max leveys 2300 mm, max pituus 8000 mm) kannattaa asettaa, jotta automaatti tuottaa valmistuskelpoista geometriaa.
Saako nopean myyntikuvan ulos?
Kyllä. Visualisointi-otsikon alta voi tehdä nopeat renderit suuntaa antaviksi kuviksi.
Yhteenveto
Peräkärryn suunnitteluautomaatti perustuu selkeään apugeometrian varaan rakennettuun malliin, paikallisiin osiin ja runkovaihtoehtoihin, joita Python-pohjainen UI ohjaa mittojen ja valintojen mukaan. Tulos on nopeasti visualisoitava ja piirustuksiin/katkaisulistoihin päivittyvä konfiguroitava malli, jonka ylläpito on suoraviivaista, kun säännöt ja indeksit on dokumentoitu hyvin.
Related Articles
- Python-apuohjelmien ajaminen asiakaskohtaisesta valikosta Vertex G4:ssä
- Ideoita tuotedokumenttien rakentamisen nopeuttamiseen
- Revisiomerkinnät piirustusten dxf-, dwg- ja pdf-tiedostoihin Vertex G4:n avulla
- Vertex G4:n mittataulukkoa ohjaavan Python-koodin käyttämistä omien apuohjelmien ajamiseen
- Älykkäät Python-kokoonpanot ja kirjastomallit